The metric tensor is one of the most useful tools in mathematics. No matter your coordinate system, the metric tensor allows you to measure the same distances! However, for those unfamiliar with tensor calculus, the various subscripts and symbols of the metric tensor look like an indecipherable rune, and even for those who understand the symbols, the metric tensor may seem very abstract and divorced from the physical world. However, the metric tensor becomes much more tangible when it is seen as a crucial tool in relating any space to the very visualizable Law of Cosines. In order to show this deep connection, this post will proceed in the following way:
- Prove the Law of Cosines,
;, for both acute and obtuse angles
- Show how the Law of Cosines for Vectors,
intuitively applies to vector measurements,
- Show how the Distance Invariant
in tensor calculus uses the metric tensor to express the Law of Cosines for Vectors for flat space
- Apply a more rigorous definition and deeper intuition of the metric tensor to see how the equivalence of the Distance Invariance to the Law of Cosines for Vectors is upheld in more complex spaces
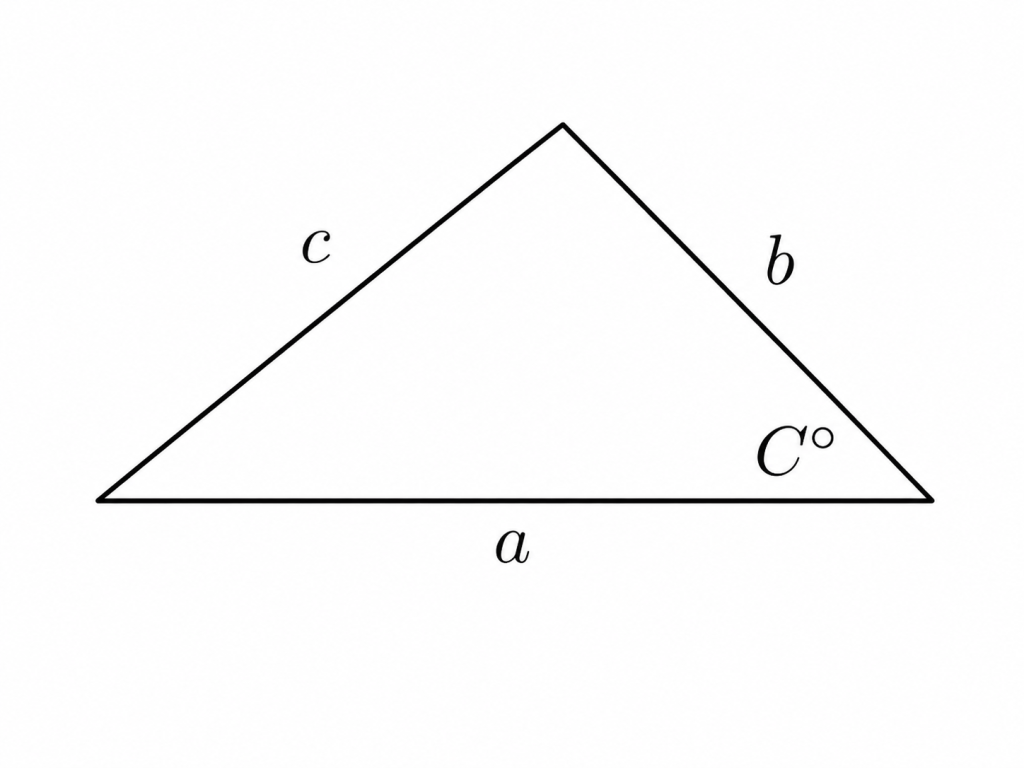
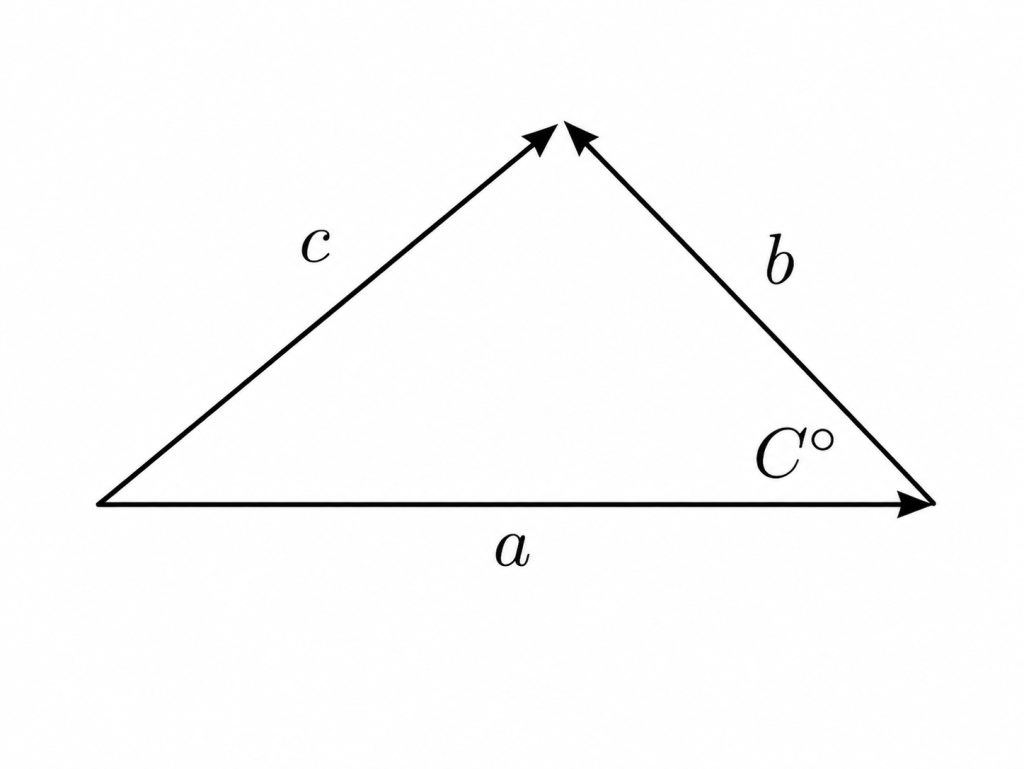
- Proof of the Law of Cosines with an acute angle, given the triangle below. It is assumed we only know the values of sides a, b, and
.
First, draw the height of the triangle perpendicular to base a and label the right segment x and the left segment a-x:

Now we see we have the following relationships:

with

Let’s plug these back into 1 to get:
2.

Let’s expand the above :
3.

Now group the 2 terms with the common factor b2 and rearrange:
4.

Plugging in 
5.
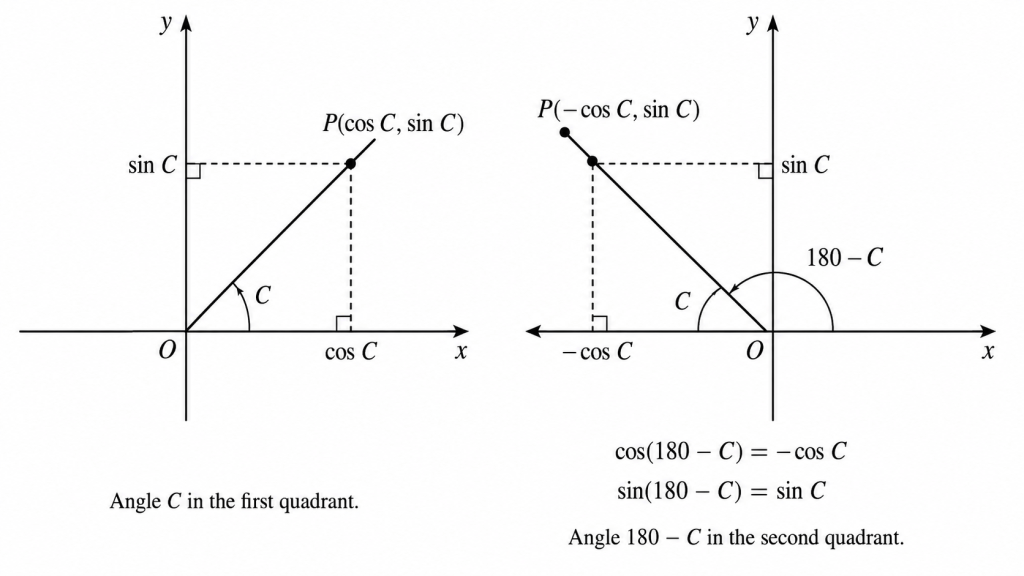
We see from the above picture that when angle C is acute, we effectively have side b of the triangle bend back towards side c, thereby diminishing the length of side c compared to a right triangle where b is perpendicular to a. This diminishing of the length of side c accounts for the negative sign in front of 2abcosC, which is a positive term when angle C is acute. So when angle C is acute, our Law of Cosines,
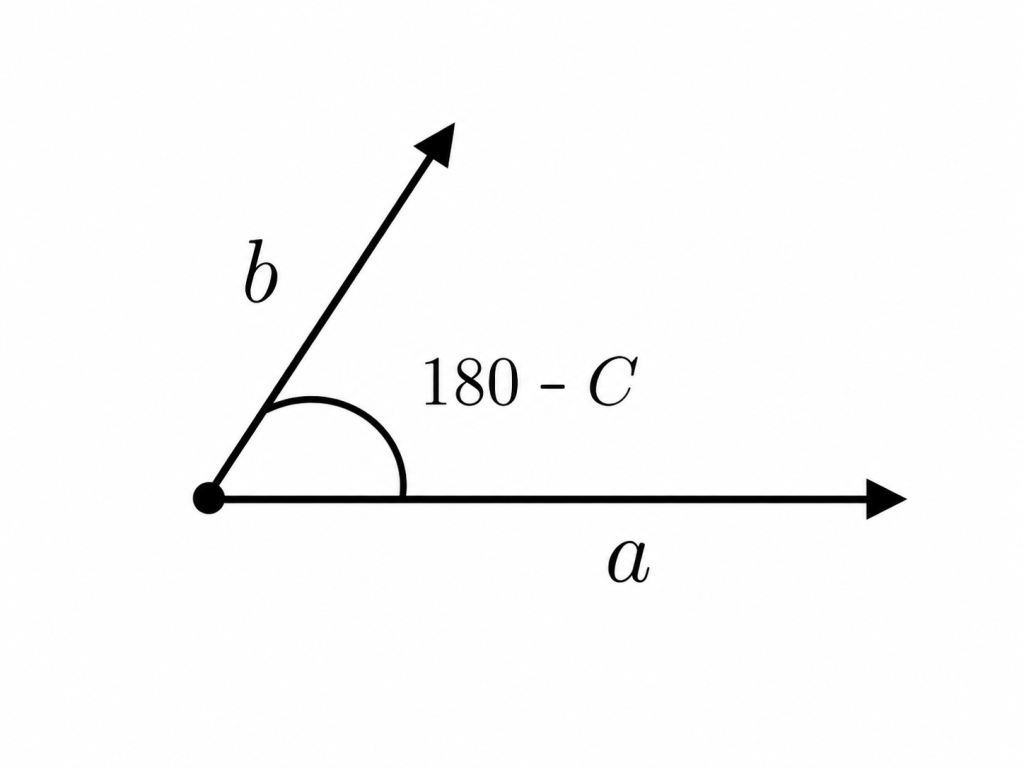
Let’s now prove the Law of Cosines for an obtuse angle:
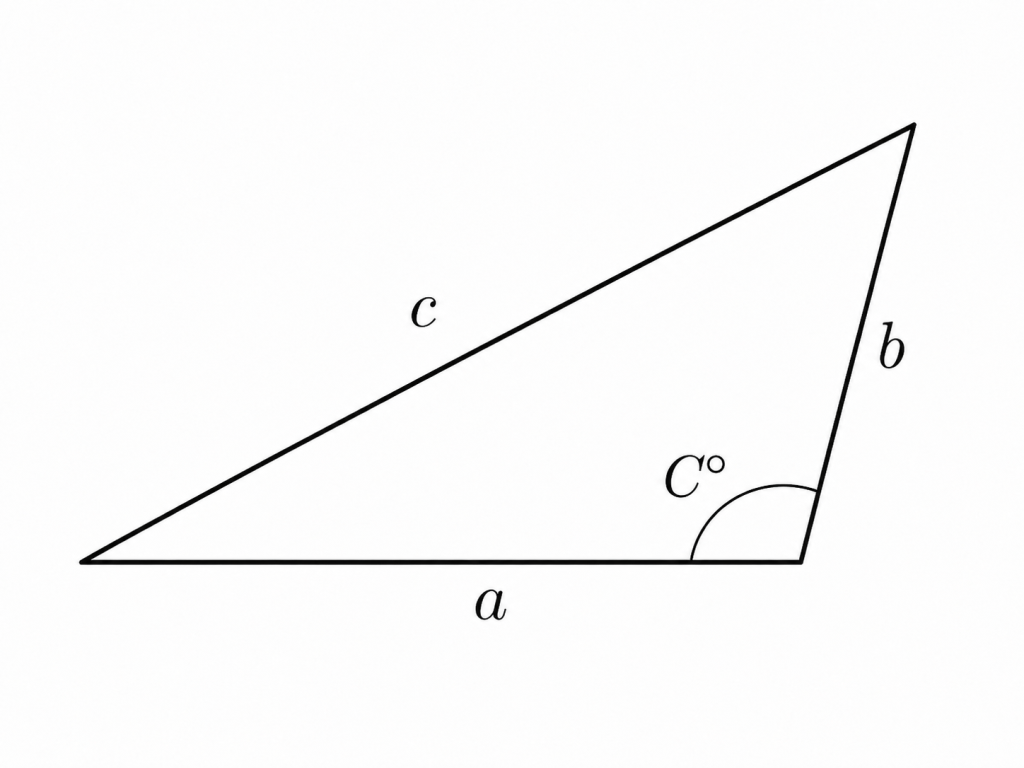
Now let’s draw in a height h by extending base a by x and by labeling the angle supplementary to C as 180-C :
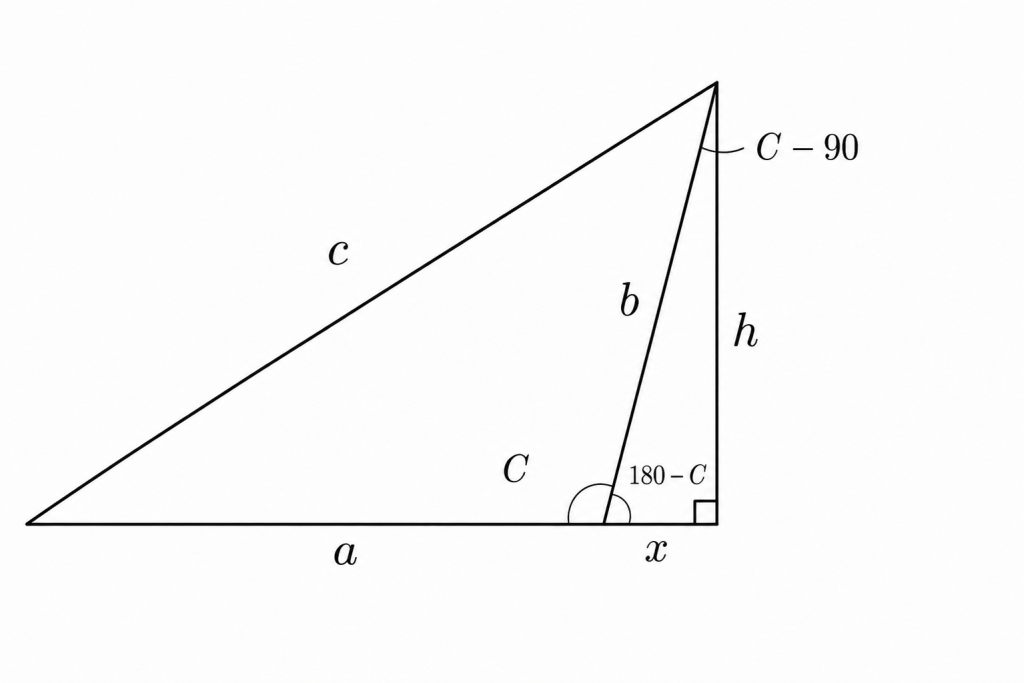
From the above picture it is clear that

with 

2.

We can plug 

After plugging these substitutions into equation 2. we now get:
3.

Let’s expand the above to get
4.
and substituting
5.
When angle C is obtuse in our triangle, we effectively have side b bend further away from side c thereby comparatively elongating the length of side c. The cosine of an an obtuse angle, however, is negative, so the subtraction of -2abcosC when C is obtuse actually creates a positive term, showing that side c is longer than when angle C is acute. Compared to a right triangle formed by angle C equalling 90 degrees , when angle C is obtuse we find that c2 is exactly -2abcosC greater than the Pythagorean Theorem’s c2= a2 + b2
Of course, if angle C were 90 degrees, then cos(90)= 0, and our Law of Cosines,
So we just derived and built some intuition for our Law of Cosines:
2. Law of Cosines Intuition Applied to Vector Measurement
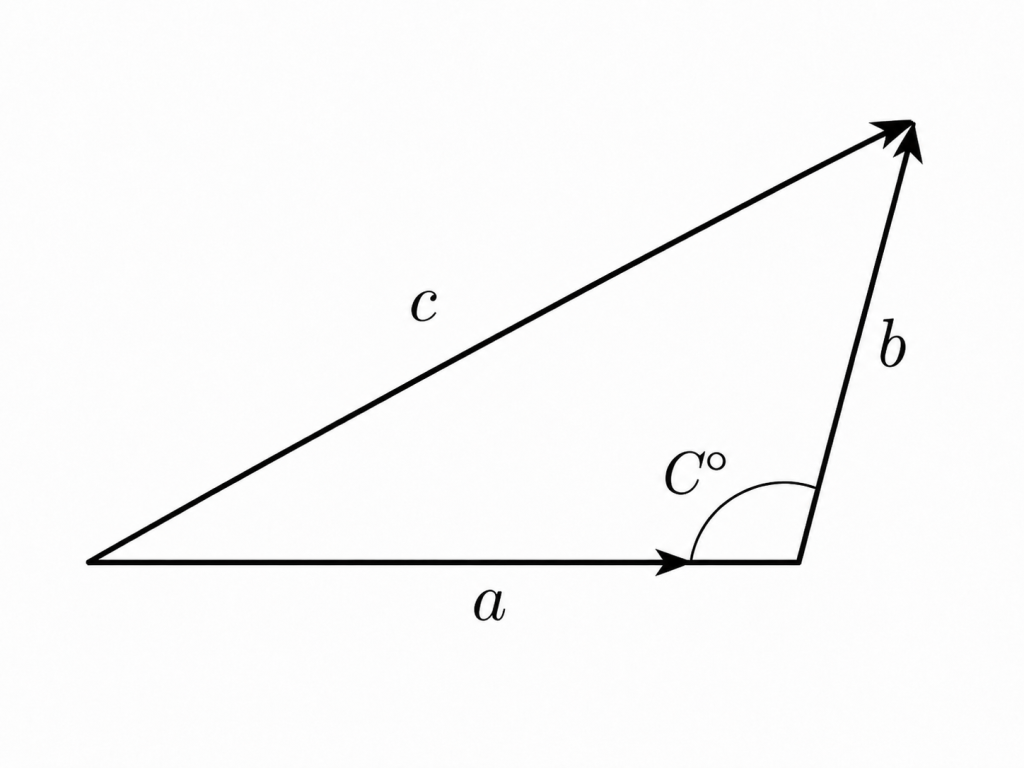
We can derive a slightly different form of the law of cosines if we have vectors: 
Below we have a triangle that shows the addition of two vectors 


The final term in our original Law of Cosines, 2abcosC, is almost equivalent to twice the dot product of the vectors a and b. However, angle C as pictured above is no longer the relevant angle measurement for the vectors a and b; instead, when we take the dot product of two vectors, the tail of 

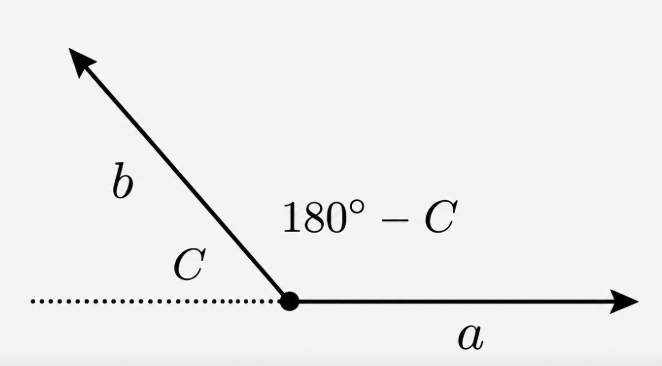
By taking the cosine of the angle between these tail-to-tail vectors, we correctly get the part of 
The dot product and its relevant angle of 180-C automatically account for the backward bending nature of vector b and the consequent shortening of vector c This, in fact, is the whole reason why we must place the vectors tail-to-tail; if we hadn’t, we would have calculated our dot product with the original acute angle of C, and therefore obtained a positive value for the dot product, which would have falsely indicated that the two vectors point in the same direction, implying that vector c would be elongated rather than shortened compared to a right triangle).
Thus, in the Law of Cosines for Vectors, we no longer need a negative sign in front of the dot product when angle C is acute; the angle formed by the tail-to-tail placement of the vectors, 180-C, already accounts for the backward bending direction that vector b makes to vector a and therefore embeds its own negative sign.
Let’s examine when
In order to take the dot product of vectors a and b, lets translate vector b to the left so that it is tail-to-tail with vector a:
Now we see that 180-c is acute, so cos(180-c) is positive, which correctly indicates the fact that the projection of vector b points in the same direction as vector a. When C is obtuse, the dot product of
3. The Distance Invariant as Measured by the Metric Tensor is the Law of Cosines
The metric tensor is an amazing mathematical tool that ensures that no matter the coordinates used, the distances calculated in any frame are always equivalent.
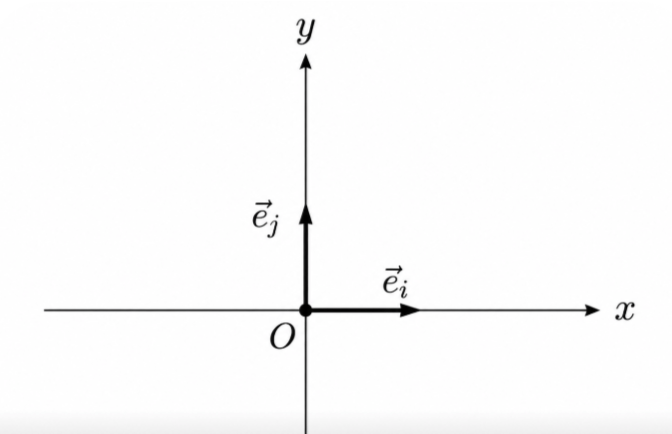
To understand what the metric tensor is, we must first define a few terms. As we already know, a vector is described by its components and directions. The component is a number that tells us how long the vector is in terms of a given coordinate basis direction. The direction, on the other hand, is given by a basis vector, which is defined by the coordinate system itself. Basis vectors are commonly written in the following notation: 



Now, in terms of the metric tensor, for two dimensions the distance measured in Cartesian coordinates is written as:


The above can be expanded according to the Einstein Summation convention (the Einstein summation convention means that when an index appears twice in one term, once as an upper index and once as a lower index, you automatically sum over that index.) to the more familiar 
Let’s see how the Distance Invariant with the Metric Tensor is equivalent to the Law of Cosines in the simplest cases. Below are the basis vectors of coordinate length 1 in the Cartesian coordinate system:
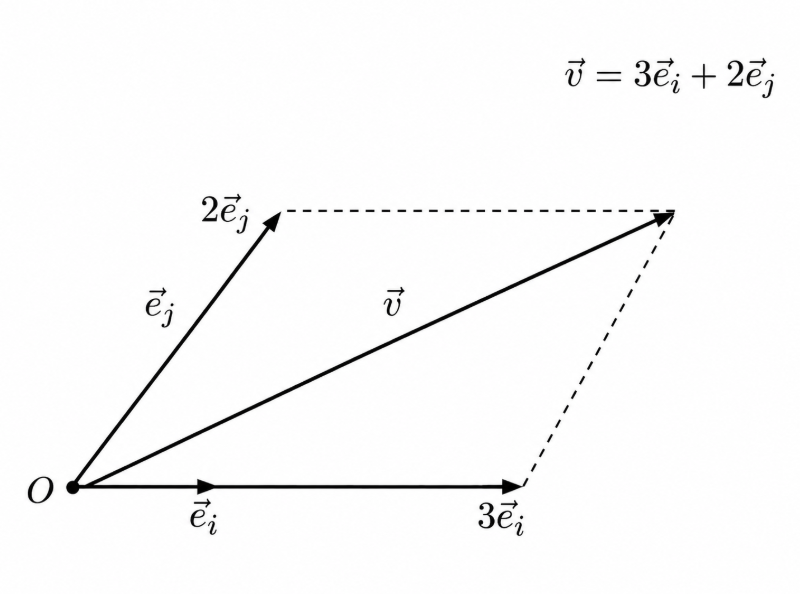
And here is a vector, composed of components and basis vectors:
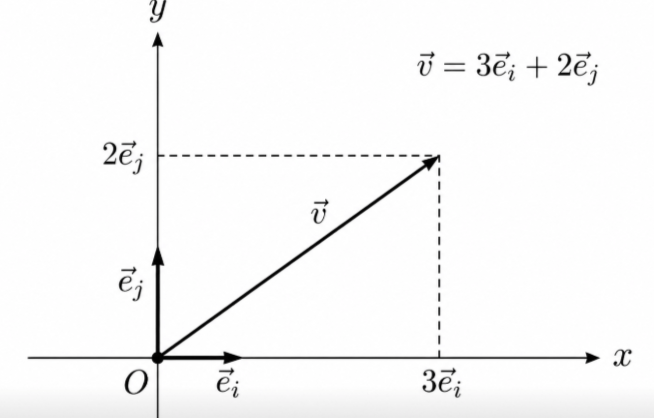
Now the metric tensor stores the dot products of all the combinations of the basis vectors of a coordinate system. With an angle of 90 between basis vectors and their lengths as 1, our metric tensor is:

Given the values our vector components, we get the following for the square of the distance:

Notice this is exactly the same value for what the Law of Cosines for Vectors would give:

which is of course the same as what our original Law of Cosines for Triangles gives (note that theta is still 90 degrees, since 180-90=90:

Now let’s see what happens if the basis vectors aren’t perpendicular, but rather are separated by a head-to-tail angle of 120 degrees, which corresponds to a tail-to-tail angle of 60 degrees. Compared to when the angle was 90 degrees, the distance measured is greater in both the Law of Cosines for Vectors and the Distance Invariant with the Metric Tensor:
Our metric tensor now becomes

so our distance invariant using the metric tensor is

and our Law of Cosines for Vectors gets the same distance:

and it is also the same for our original Law of Cosines for triangles, noting that now theta is 120 degrees instead of 60:

4. A Deep Dive into the Metric Tensor Intuition and the Application of the Distance Invariant and Law of Cosines to More Complex Spaces
So far, we have seen that the metric tensor acts like a local Law of Cosines inside one coordinate system. Now we will see its deeper power: it changes from coordinate system to coordinate system in exactly the way needed to keep the same.
The true magic of the metric tensor is the fact that 
It all has to do with how we convert between different coordinate systems, and then the metric tensor stores that knowledge for the purpose of measuring distances. The coordinate transformation tells us how the new basis vectors are built from the old basis vectors. Once we know how these new basis vectors are built from the original basis vectors, the metric tensor records the new basis vectors’ dot products in terms of the original basis vectors. Then, the metric tensor organizes this information in a way that makes distance calculations very easy.
As a very simple, concrete example, imagine you have a basis vector of 1 meter pointing east, and you measure a distance of 1000 meters. Then, we rescale the basis vector so that it is now 1,000 times bigger; this new basis vector now represents 1 kilometer in a new coordinate system. What happens to our distance when we measure it in this new coordinate system? We now record 1 km of distance; this means that while we expanded the size of the basis vector by 1000, we shrunk the size of vector component by 1/1000, as in the following picture:
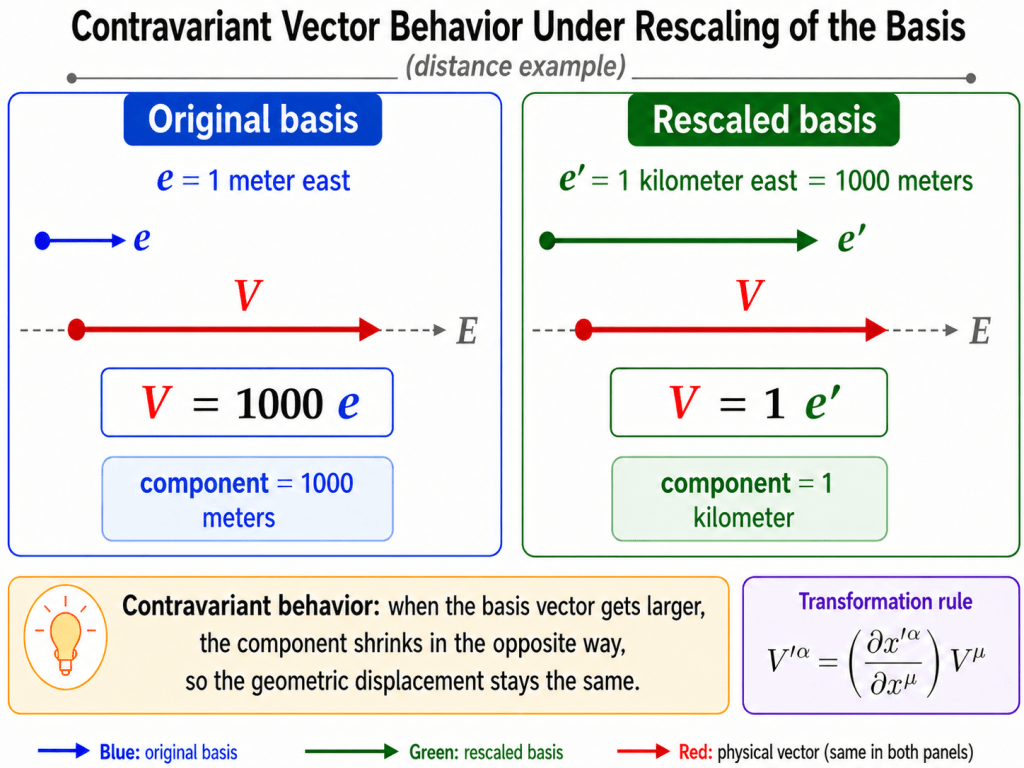
So while one person records 1000m with the 1 meter due East basis vector, the other person records 1km with the 1 km due East basis vector, but we are talking about the same physical distance vector with the same distance traversed (just in different units). The metric tensor helps to convert our new coordinate system into the terms of the old coordinate system by first relying on the relationship between the coordinates:
The previous example was the simplest possible. But what if the basis vectors are not only different lengths but also different angles to each other like when our original basis vectors are Cartesian and our new coordinate system has polar basis vectors:
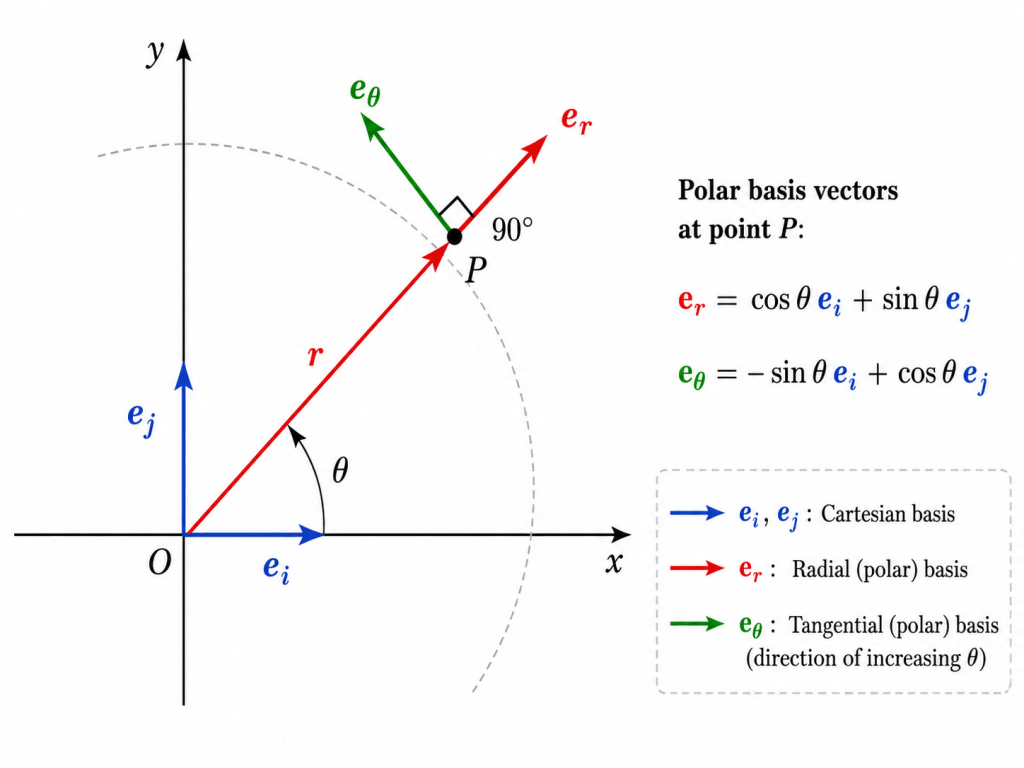
In terms of polar coordinates, our Cartesian coordinates are:

Now we must figure out how our polar basis vectors are built from our Cartesian basis vectors, using Einstein Summation Convention: 
In building our new polar basis vectors out of each of the old Cartesian basis vectors, we get the following:


Below in the top of the diagram, I added how this transform of
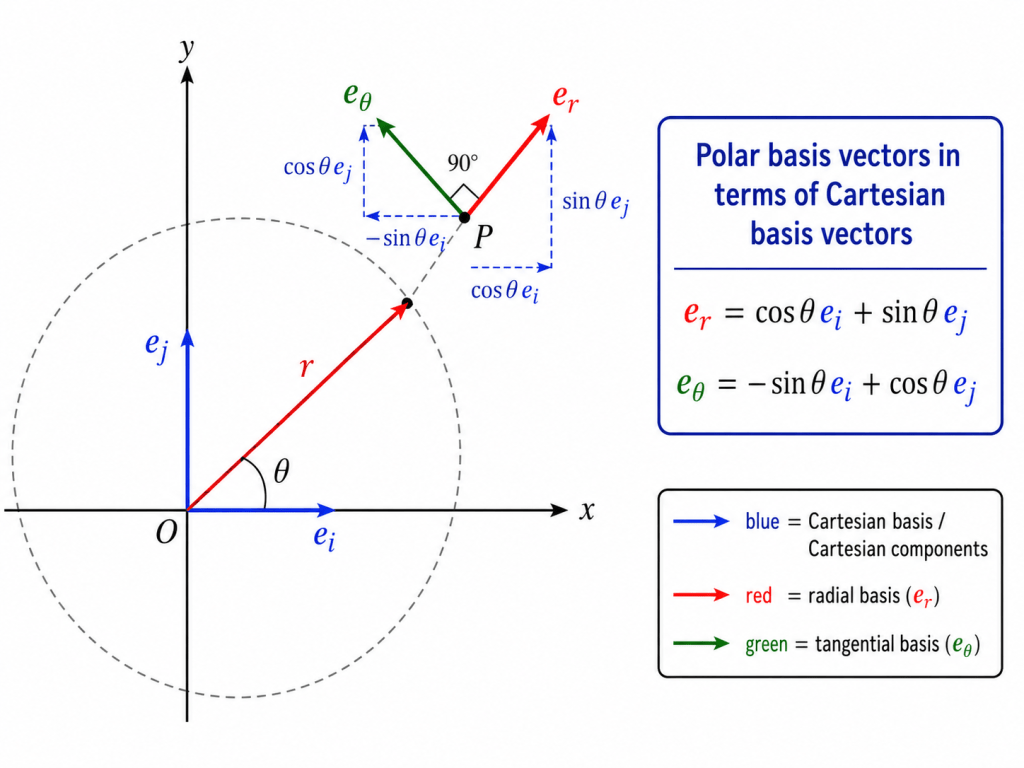
So, we literally see how each polar basis vector is built from various combinations of our Cartesian basis vectors.
Now that we have solved for our Polar basis vectors in terms of our Cartesian basis vectors, we can take the dot products as in the following to get the polar metric:

The general distance invariant in terms of our primed coordinates is 


This tells us that the distance measured when using polar coordinates is:: 


The distance invariant for the polar metric, 

So far we have learned the following:
- That the Law of Cosines and the Distance Invariant using the Metric Tensor measure distances by taking into account both angles and lengths of the coordinate bases in the same general formula using the same geometric ideas.
- That the Distance Invariant using the Metric Tensor can also translate between different coordinate systems in order to arrive at the distance measured by a chosen original coordinate frame, in our case Cartesian.
What we haven’t given an intuition to yet is:
- Can the Distance Invariant using the Metric Tensor still be equal to the Law of Cosines for curved spaces, not just flat spaces?
- How can we visualize applying the Law of Cosines to Higher Dimensional spaces?
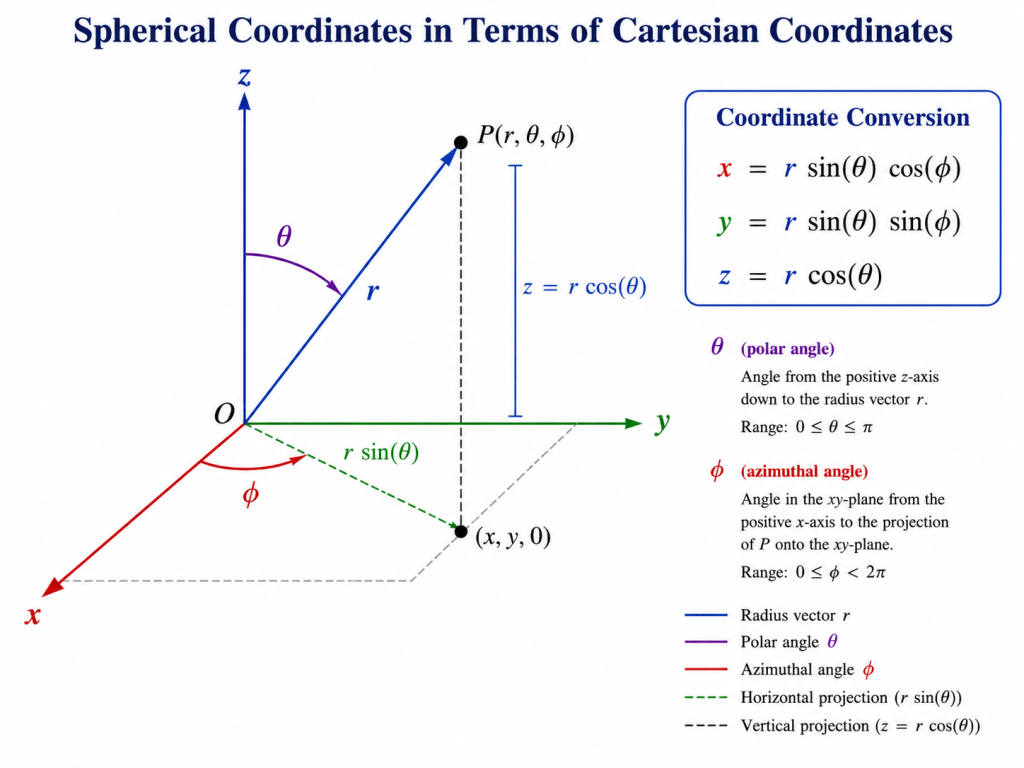
Let’s address the first of these points now: can the Distance Invariant using the Metric Tensor still be equal to the Law of cosines for curved spaces, specifically the surface of a sphere. Though we will start with three dimensions to explore spherical coordinates, we will end up restricting the following example to 2 dimensions to better understand how the Law of Cosines emerges even on a curved surface:
Taking all of our partial derivatives we get:

Because 




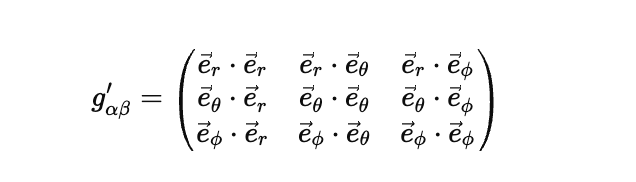
we get (please zoom in on the matrix below to see all the terms written out more legibly)

After simplifying each dot product we get:
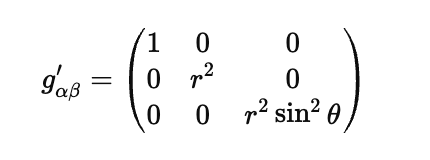
So our spherical distance formula is
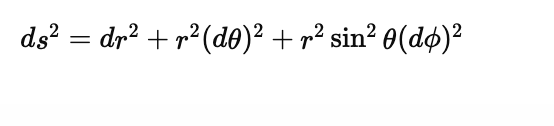
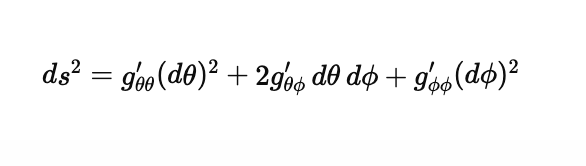
If we restrict ourselves to being on the surface of a sphere with constant radius length r, our dr term is 0 since we are not moving radially and we get the spherical distance formula of 

which, as previously discussed, is equivalent to the Law of Vectors for Cosines.
Note that this final expression gives the dot products of spherical surface basis vectors in terms of our Cartesian basis vectors (these are all of our g’ terms), and then uses the Law of Cosines for Vectors to calculate the distance traversed on our spherical surface.
Though this distance invariant for the surface of a sphere, 
Now that we have shown that the distances in non-flat space are still calculable from the Law of Cosines embedded in the Distance Invariant, let’s address our final point: understanding how the Law of Cosines and the Distance Invariant apply to higher dimensions. If we have a 3 dimensional vector, with basis vectors e1, e2 and e3 along with corresponding components a, b and c, then the Law of Cosines for Vectors is:

If the basis vectors are perpendicular in such a space, all the cosine terms go to 0 and we get the Pythagorean Theorem for three dimesnions. However, let’s present a case where none of the basis vectors are perpendicular to make it slightly more interesting:
In the image below, we would like to calculate the length of the vector composed of ae1 + be2 + ce3
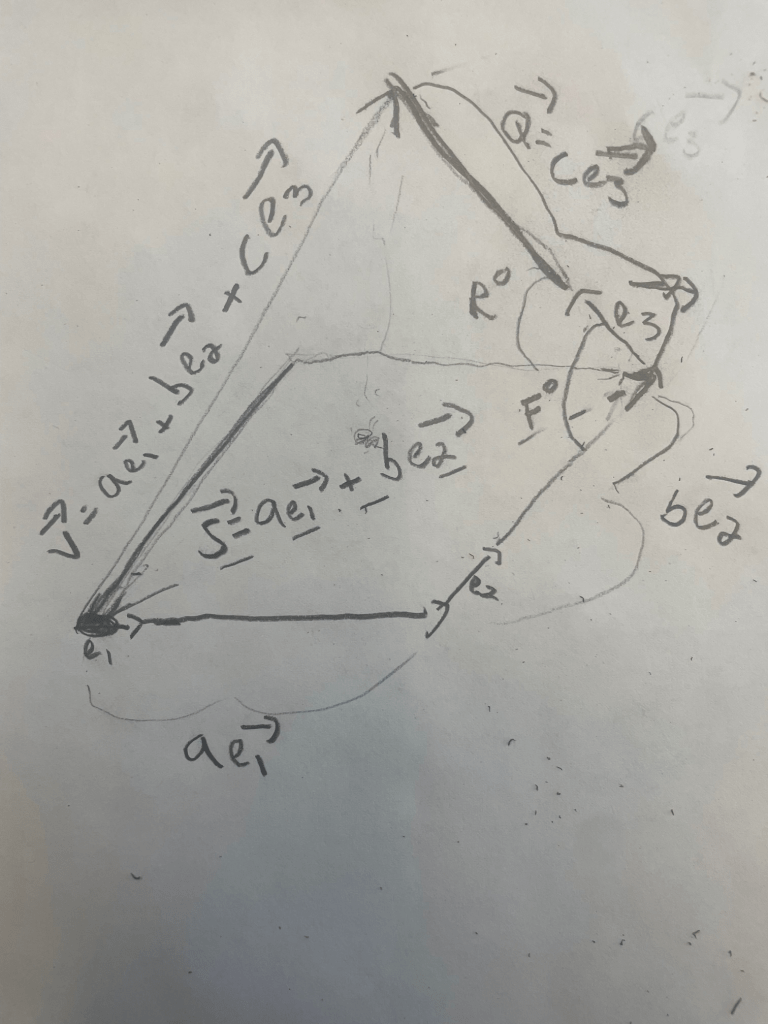
We see that vector v is composed of 3 vectors with 3 bases (namely ae1, be2 and ce3), but we can simplify the problem by thinking of vector v being composed of only 2 vectors, vectors S and Q. By simplifying, we can now easily use the Vector Law of Cosines with vectors S and Q to calculate the length of vector v: 
Before we explore the dot products, let’s first break vector S down with the Vector Law of Cosines:
Substituting 

Now Q2 is just (ce3)2, so upon substitution our previous equation becomes 
The final step is to get the dot product of S and Q in terms of our basis vectors, so now we must break down vector S into the two bases it is composed of, e1 and e2, and express vector Q in terms of its basis e3:
2

Substituting this expression for 2
we finally get:

Now if we were to use the Distance Invariant with the metric tensor, we would have
which upon expanding using our specific vector components would become:


What about if we had even more dimensions? The distance invariant would still take the same form. To see why with an example of a 4 dimensional vector, we can assume it is composed of 2 separate vectors to simplify the problem, just as we did with the 3 dimensional vector v in our previous example. Let’s assume that this new 4 dimensional vector, called vector z, can be broken down into the 3 dimensional vector v and then an additional dimension spanned by vector f. Then the Vector Law of Cosines gives:

We can plug in 

Now let’s assume vector f has component d with basis vector e4. We can plug that in to the above expression to obtain

which upon rearranging terms and expanding the dot product gives:

Of course, the distance invariant with the metric tensor would give the equivalent expression:

We can continue this iterative process for as many dimensions as we would like using the same repetition:
- Compose an n dimensional vector out of 2 separate vectors, an n-1 dimensional vector and a 1 dimensional vector (which is the nth dimension newly added).
- Take the Law of Cosines for Vectors using the n-1 dimensional vector and the 1 dimensional vector
- Plug in the Law of Cosines expression that already measured the length of the n-1 dimensional vector into the equation in step 2.
- Plug in the vector basis and component of the 1 dimension vector into the equation in step 2.
- Now, with these substituted terms, expand twice the dot product of the 1 dimensional vector with each separate basis of the previous n-1 dimensional vector, and rearrange terms
The Law of Cosines turns out to be more profound than when I first encountered it in 9th grade geometry. Though the Law of Cosines takes different forms for triangles, vectors and the Distance Invariant in tensor calculus, it ultimately is the foundation for each. We also showed in this post what makes the metric tensor unique: that it allows us to convert our distances seamlessly from one coordinate frame to another, no matter if the space is flat or curved. But underlying the complicated notation of the Distance Invariant with the Metric Tensor is ultimately the Law of Cosines! Not only does the Law of Cosines underlie calculations of distance for both flat and curved spaces, but it also is used to measure distances in any dimensional space that we so choose. This powerful yet simple geometric law is often hidden behind complex notation, but when we dig deep enough, we rediscover its importance.
